The demand for high-precision positioning is surging with the advancement of autonomous driving, drones, robotics, and digital twin technologies. While traditional GPS navigation meets everyday needs, meter-level errors often prove inadequate for automated applications. Consequently, RTK technology—capable of centimeter-level accuracy—is rapidly becoming essential infrastructure for smart devices.
Within the high-precision positioning industry, RTK has emerged as a core technology for surveying, agricultural automation, industrial robotics, and autonomous driving systems. GEODNET leverages a decentralized infrastructure model to expand RTK services from regional networks to a global scale, delivering high-precision positioning to a broader range of devices and developers.
What Is RTK Positioning Technology?
RTK (Real-Time Kinematic) is a technology that achieves high-precision positioning by measuring the carrier phase of satellite navigation signals.
Standard GNSS receivers typically calculate position directly from satellite broadcast signals, with accuracy usually within a few meters. RTK, however, introduces a fixed base station that computes errors in real time and transmits correction data to mobile terminals, dramatically improving positioning accuracy.
By reducing positioning error from the meter to the centimeter level, RTK is widely adopted in scenarios demanding high-precision navigation and surveying.
Why Does Standard GPS Produce Positioning Errors?
Standard GPS positioning errors stem from a combination of several factors.
Satellite Orbit Errors
Satellites may experience orbital deviations during operation, leading to inaccuracies in position calculation.
Ionospheric and Tropospheric Delays
Satellite signals passing through the atmosphere are affected by the ionosphere and troposphere, altering their propagation speed.
Multipath Effect
Signals reflected by buildings, mountains, or the ground before reaching the receiver can cause measurements to deviate from the true position.
Receiver Errors
Differences in hardware performance and algorithmic capabilities across devices also affect the final positioning result.
The accumulation of these errors typically keeps standard GPS accuracy within a range of several meters.
How Does RTK Achieve Centimeter-Level Positioning?
The core of RTK lies in using a base station to deliver real-time error corrections.
The base station is installed at a precisely known coordinate, allowing it to accurately calculate the difference between received satellite signals and their theoretical values. These differences are converted into correction data and transmitted over a network to nearby mobile devices. While receiving satellite signals, the mobile device also receives this correction data, thereby eliminating most errors and achieving centimeter-level accuracy.
This process is typically completed within seconds, hence the name "real-time kinematic positioning."
What Is the Difference Between GNSS, GPS, and RTK?
Many users conflate GNSS, GPS, and RTK, but these terms operate at different conceptual levels.
GNSS Is the Global Navigation Satellite System
GNSS (Global Navigation Satellite System) is the umbrella term for all global navigation satellite systems.
The main systems currently include:
- GPS (United States)
- GLONASS (Russia)
- Galileo (European Union)
- BeiDou (China)
GPS Is a Component of GNSS
GPS is one of the earliest and most widely used satellite navigation systems.
In everyday language, "GPS navigation" typically refers to devices that actually receive signals from multiple GNSS systems.
RTK Is a High-Precision Positioning Technology
RTK is not a satellite system but a positioning method that performs error correction based on GNSS signals.
Thus, the distinction is: GNSS provides the satellite signals; GPS is one of those GNSS systems; RTK uses those signals to achieve centimeter-level positioning.
What Components Make Up an RTK Network?
A complete RTK system typically consists of several components working in concert.
Base Station
The base station continuously receives satellite signals and calculates errors.
Correction Data Server
The server processes base station data and generates standardized correction information.
Communication Network
The internet or a wireless communication system transmits correction data to terminal devices.
Rover Terminal
The rover is the device that uses the positioning service—such as a drone, robot, or autonomous vehicle.
These components together form the RTK positioning service architecture.
How Does GEODNET Build a Decentralized RTK Network?
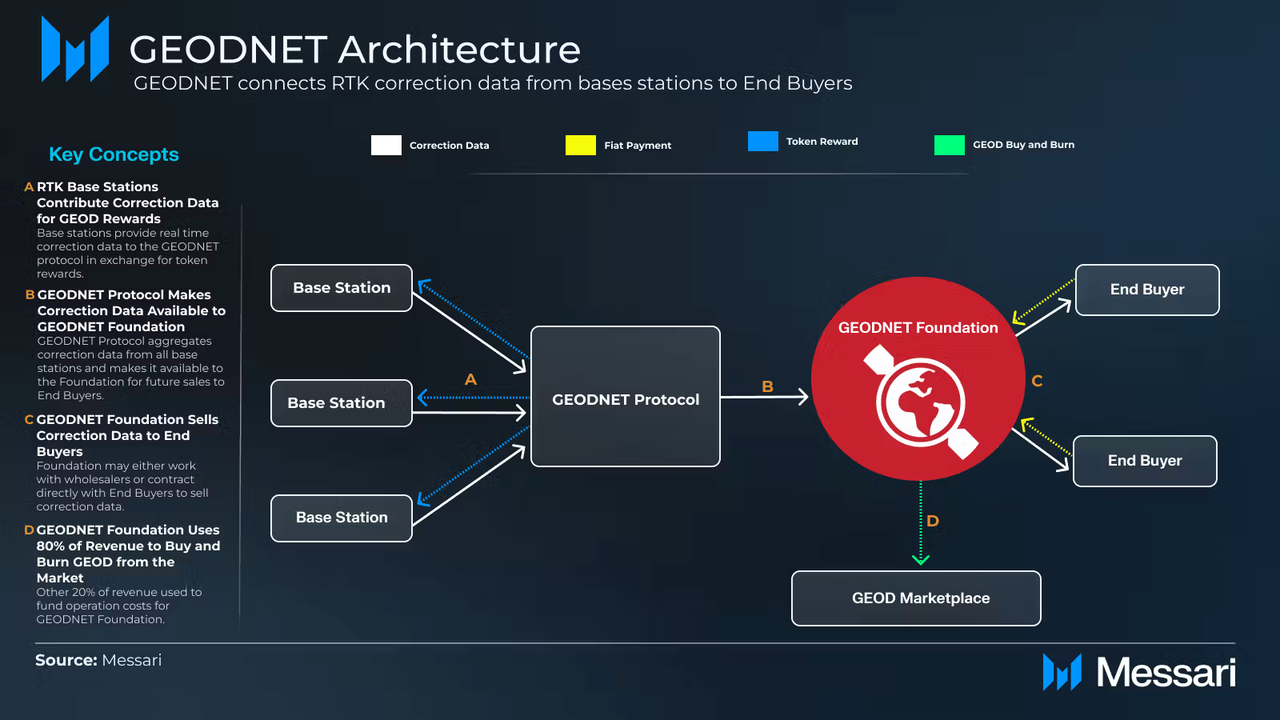
GEODNET fuses traditional RTK networks with the DePIN model to create a global high-precision positioning infrastructure. Instead of relying on centralized operators to build base stations, GEODNET allows users worldwide to deploy GNSS base stations and connect them to the network. Node operators earn GEOD token rewards by providing high-quality positioning data, fueling continuous network growth.
This model lowers infrastructure costs while improving coverage and expansion efficiency. As more nodes join, GEODNET can deliver high-precision positioning services to an increasing number of regions.
How Does a Single RTK Positioning Process Work on GEODNET?
Understanding GEODNET starts with following a complete positioning workflow.
Step 1: Base Station Receives Satellite Signals
GEODNET nodes continuously receive signals from multiple GNSS systems.
Step 2: Calculate Real-Time Error
The base station calculates the current satellite signal error based on its known coordinates.
Step 3: Generate Correction Data
The system converts the error into standard RTK correction information.
Step 4: Send to Terminal Device
The correction data is transmitted over the internet to drones, robots, or vehicles.
Step 5: Terminal Completes Positioning Correction
The device uses the correction data to calibrate the satellite signals, achieving centimeter-level positioning.
This entire process runs continuously in real time.
Which Industries Primarily Use RTK Technology?
High-precision positioning has become a critical infrastructure for digital transformation across many industries.
Autonomous Driving
Autonomous vehicles rely on centimeter-level positioning for path planning and lane detection.
Drone Surveying
Surveying drones use RTK to improve the accuracy of maps and 3D models.
Smart Agriculture
Autonomous tractors and precision seeding equipment depend on high-precision navigation for field operations.
Industrial Robots
Autonomous mobile robots require precise positioning for path control and collaborative tasks.
Spatial Computing
Augmented reality and digital twin systems need accurate position data to build realistic spatial models.
What Challenges Does RTK Technology Face?
Despite its high accuracy, RTK still faces practical limitations.
First, base station density directly impacts positioning performance. Second, network communication latency can affect the timeliness of correction data. Additionally, obstructions and multipath effects in complex urban environments can still degrade positioning quality. As multi-frequency GNSS technology advances and global base station networks expand, these issues are gradually being mitigated.
Conclusion
RTK is one of the most widely deployed high-precision positioning technologies today. By correcting satellite signal errors in real time, it elevates standard GNSS accuracy from the meter level to the centimeter level. The growth of autonomous driving, drones, robotics, and smart agriculture has made RTK an indispensable foundation for intelligent devices in the real world.
GEODNET combines RTK technology with the DePIN model, offering high-precision positioning services through a globally distributed base station network. In contrast to traditional centralized RTK networks, GEODNET uses a community-driven approach to expand infrastructure coverage, making high-precision positioning accessible in a wider range of applications.
FAQs
What is RTK positioning technology?
RTK (Real-Time Kinematic) is a high-precision navigation technology that uses a base station to correct satellite signal errors in real time, achieving centimeter-level positioning accuracy.
What is the difference between RTK and GPS?
GPS is a satellite navigation system, while RTK is a positioning technology that uses GPS and other GNSS signals for error correction. Standard GPS accuracy is typically within a few meters; RTK achieves centimeter-level accuracy.
Why is RTK more accurate than standard GPS?
RTK uses a base station to calculate and transmit error corrections in real time, eliminating major error sources such as satellite orbit errors and atmospheric delays, resulting in significantly higher accuracy.
What positioning technology does GEODNET use?
GEODNET primarily relies on GNSS and RTK technology, providing real-time positioning corrections via a global network of base stations to achieve centimeter-level navigation.
What is the difference between GEODNET and traditional RTK networks?
GEODNET adopts the DePIN model, where a global community jointly deploys base stations and receives token incentives, whereas traditional RTK networks are typically built and maintained centrally by government agencies or commercial operators.
Which devices need RTK positioning?
Drones, autonomous vehicles, agricultural machinery, industrial robots, surveying equipment, and some AR and spatial computing terminals all require the high-precision positioning capabilities that RTK provides.